Liquidación de más de 60 productos con hasta 30% de descuento valido hasta 31 de diciembre o hasta agotar stock
Calculador de resolución necesaria para camaras de seguridad
Con esta herramienta, usted puede determinar de forma aproximada, resolución horizontal necesaria para llevar a cabo una necesidad en específico y con ello elegir la tecnología necesaria.
si el resultado es mayor a la resolución horizontal de la cámara que usted desea comprar, puede dividir la escena en más de un bloque y usar varias cámaras.
|
|
Debe ingresar el ancho de la superficie a observar. Debe ingresar la profundidad de la escena. Debe ingresar el sensor deseado. Ingrese el tipo de necesidad requerida. |
Aritmética
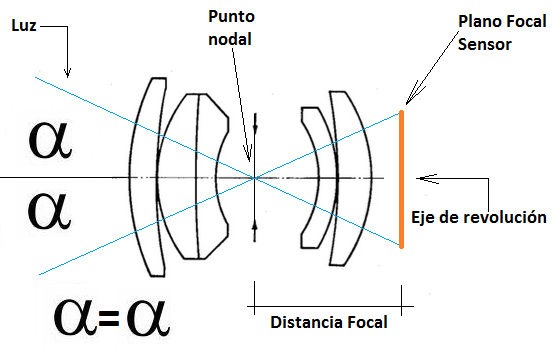
Para simular el comportamiento de la óptica, primero, debemos saber que:
1- Todo lente empleado en video y fotografía, capta un cono luminoso proveniente del objetivo que se desea observar.
2- Este cono es proyectado sobre una superficie llamada "Plano Focal".
3- El plano focal coincide con la posicion del sensor CCD o CMOS.
4- El punto en donde los rayos luminosos se invierten antes de llegar al plano focal, se le llama "punto nodal".
5- La distancia entre punto nodal y plano focal se llama "distancia focal".
6- El ángulo que provoca el conjunto de "lente-sensor" es simétrico respecto del eje de revolución del lente.
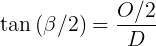
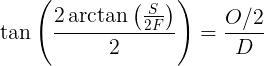
Por lo que se tiene que:
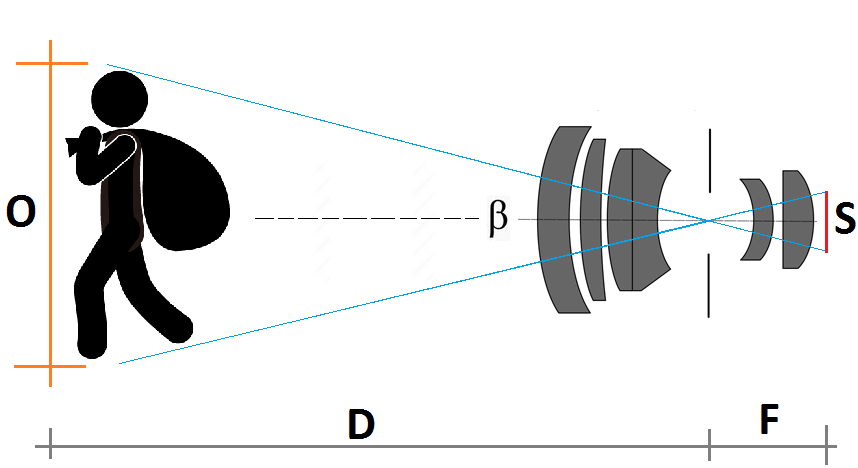
Donde :
O: altura o anchura de la escena que se desea vigilar (en el calculador, expresado en metros).
D: distancia entre la cámara y la escena que se desea vigilar (en el calculador, expresado en metros).
F: distancia focal del lente empleado (en el calculador, expresado en milímetros).
S: Tamaño del sensor de la cámara calculada (en el calculador, expresado en fraccion de pulgadas).
β: el ángulo resultante del conjunto de distancia focal y sensor de la cámara.





De modo que es posible modelar una simulación basandonos absolutamente en valores que conocemos tales como la distancia focal, el tamaño del sensor y dimensiones de la escena. Sólo nos faltaría determinar dos valores adicionales: El tamaño del sensor y la cantidad de pixeles necesarios en la escena. Para esto último, debemos comprender primero, las posibles aplicaciones existentes en CCTV.
Niveles de observación en CCTV (aplicaciones para CCTV)
Antes de establecer, los diferentes niveles de observación de un sistema de CCTV, hay que saber, que un sistema de vigilancia en video, es un sistema de recolección de información. Esta información, es la que nos permitirá en el futuro, generar una estrategia de inteligencia para prevenir o contrarrestar situaciones que pudieran causarnos algún tipo de perjuicio.
Es importante establecer, que un sistema de vigilancia, no es un sistema de seguridad, ya que en rigor no protege ni asegura el lugar de su instalación (como sí lo haría una reja o un escudo). Lo que sí provee un mecanismo de seguridad, son la acciones que se puedan tomar, en base de la información que recolecta el sistema de vigilancia en video, y es por ello que es de vital importancia saber con que nivel de detalle necesitamos capturar la información en primer lugar. Esto cobra especial importancia en los sistemas de video grabados, ya que un video consta de 30 fotografias por segundo y cada fotografía es una oportunidad de obtener información mediante alguna técnica de laboratorio, conforme mayor detalle posea la imagen, mayor información podremos obtener de esta, por otro lado, conforme mas informacion capturemos, más caro será el costo del sistema, de modo, que lo óptimo, es diseñar un sistema de acuerdo a las necesidades específicas de cada situación.
Existen seis niveles de observación:
Monitoreo: El monitoreo es aquel tipo de observación que persigue establecer solamente la cantidad de objetos que se encuentran en una escena y otras cualidades básicas como por ejemplo, su posición, dirección y quiza velocidad de movimiento. En una aplicación de ejemplo, si pusiéramos una cámara en un estadio, y esta pudiera sólo contar la cantidad de personas en una galería, estaríamos en presencia de una situación de monitoreo. Para satisfacer esta necesidad, se requieren 12.5 Pixeles por metro.

Detección: La detección, es un monitoreo algo más avanzado que el anterior. Se satisfacen las mismas necesidades, pro adicionalmente es posible establecer si un objeto está o no presente. La diferencia con el caso anterior, todos los objetos de la escena tienen igual significado (por ejemplo personas en la escena, son solamente personas, ni hombres ni mujeres ni niños), en este, si bien no es posible determinar rasgos que le puedan caracterizar individualmente, puede caracterizarse de forma general ejemplo: es hombre, es mujer, es auto, es moto. En una aplicación de ejemplo, en una cámara montada en un estadio, este podría definir que una persona de una galería es hombre o es mujer. Para establecer esta necesidad se requieren 25 píxeles por metro.

Observación: La observación, incluye todos los criterios anteriores, pero se le añade la capacidad de establecer rasgos característicos de un objeto de tal modo que es posible clasificarlo de forma más particular que sólo por sus cualidades esenciales. Es posible establecer rasgos generales del vestuario, forma de caminar, actividad que está realizando. En una aplicación de ejemplo, si apuntamos una cámara a la cancha, y fuera posible determinar si un jugador es de un equipo u otro, pero no es posible identificar al jugador, es una situación de observación. Para satisfacer esta necesidad se requieren 62.5 pixeles por metro.

Reconocimiento: Nuevamente, el reconocimiento incluye a las anteriores pero se agrega además, la capacidad para detectar rasgos que permitan identificar al objeto que se está observando. En un ejemplo practico, seria ser capaz de visualizar el número de la camiseta del futbolista de los ejemplos, o el modelo de un vehículo. Para satisfacer esta necesidad se requieren 125 píxeles por metro. Es posible "reconocer" a una persona en este nivel, pero sólo de forma indirecta, por ejemplo, por la forma de caminar o reconocerlo por como se viste, aunque por el grado de incertidumbre, se considera solo como una aproximación. Con el suficiente acercamiento, es posible "reconocer" rostros con esta resolución, es decir, que un software pueda establecer si la geometría corresponde o no a un rostro humano, pero debido a la baja resolución, no es posible lograr una identificación biométrica suficiente.

Identificación: La identificación queda fuera de todas las clasificaciones anteriores, ya que no permite el conteo, establecer posición y velocidad ni ninguna de las cualidades anteriores. La identificación equivale a tener suficiente información como para establecer a ciencia cierta que se trata de un objeto en particular. Si se tratara de una persona, servirá para ser reconocido por alguien que le conozca y establecer si se trata de Pedro o de Juan. Si se tratara de un vehículo, serviria por ejemplo, para leer el número de patente. La imagen impresa en una cédula de identidad cumple con los requisitos técnicos de identificación por imágenes. En este nivel de observacion, es posible capturar rostros y conservarlos con suficiente detalle como para establecer una identificación biométrica, similar a lo que ocurre en las redes sociales contempoeráneas. Para satisfacer esta necesidad se requieren 250 píxeles por metro.

Inspección: La inspección, va un poco más allá de la identificación. Se requiere resolución suficiente como para capturar detalles finos de un objeto y que este permita un análisis exhaustivo. Por ejemplo, una imagen está en el rango de la inspección si pudiera permitir diferenciar a dos gemelos idénticos, mediantes las líneas de expresión. Sería inspección si fuera posible establecer que una imagen fue tomada muchos años después que la otra. Permitirá en casos industriales establecer el buen funcionamiento de partes y piezas de un motor. Para satisfacer esta necesidad, se requieren 1000 pixeles por metro.

Sólo faltaría establecer las dimensiones de un sensor de cámara.
El formato heredado de los sensores, es el mismo que se ha empleado en sensores de televisión desde la invención de los sensores electrónicos capaces de captar video.
Esta expresión, es un formato en fracciones de pulgadas, que pareciera ser que no tiene mucho sentido, y es que actualmente no representa nada que se comercialice como tal. Antiguamente, esta medida del sensor, equivalía al al diámetro externo del tubo de vacío que contenía el sensor de video, aunque el tamaño del sensor que iba adentro, no tuviera absolutamente ninguna relación con la medida del tubo que lo contenía.

Como es evidente, el sensor propiamente tal, era de menor diámetro, pero en esa epoca el tamaño de este no proporcionaba mayor interés. Hoy en dia los sensores, ya no son basados en tubos de vacío y estos además son cuadrados, de modo que el diámetro de la superficie que corresponde al sensor, cobra un nuevo significado:
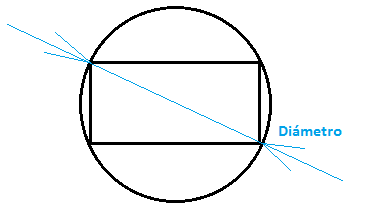
Hoy en dí el diámetro equivale a la diagonal del sensor de imagen. Este concepto es sumamente importante de comprender, ya que es cotidiano que los tamaños de los monitores se expresen en pulgadas tambien, referidas al diámetro de la diagonal. Es exactamente la misma explicación. Esto acarrea, que los ángulos descritos en una ficha técnica, sean generalmente los que se refieren al que se produce en la diagonal del sensor salvo que se exprese lo contrario.
Para homologar esta nomenclatura, en los sensores de semiconductores, en donde el tamaño del trozo de silicio es exactamente el mismo tamaño del sensor, se ha convenido, que la diagonal del sensor CCD o CMOS es 2/3 del diámetro que lo contendría un eventual tubo de vacío. En palabras mas simples, si se dice que el sensor es de 1/3 de pulgadas, significa que la diagonal de ese sensor, mide 1/3" x 2/3.
Última actualización: Martes 17 de Septiembre del 2024 a las 10:43:02 Horas.